

/image%2F0999308%2F20140410%2Fob_4200ea_wax.jpg)
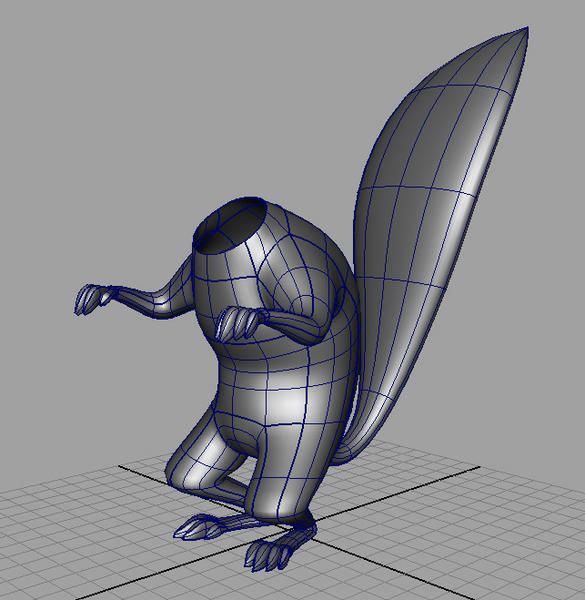
Wip écureuil 1 : modélisation en NURBS
Oula.
J'ai bien galéré là.
La modélisation en NURBS m'a paru bien moins intuitive qu'en polygonale. Ce qui est assez troublant c'est qu'on ne déplace pas directement les surfaces mais des points (Control vertex) ou des"cages" (hull) qui en quelque sorte tirent sur la surface à distance....
Et puis pour connecter par exemple ici le corps avec les bras et les jambes la méthode est très particulière....ils apellent ça le Socking : si on veut attacher un cylindre au corps, on coupe ce cylindre en mettons 4 parties dans le sens de la hauteur, puis on attache chacune de ces parties au corps afin que le nurbs se déforme harmonieusement, puis on recoupe là ou on a attaché, et enfin on rassemble les control vertex par la commande global stitch.....pfff, pas évident tout ça!
Bon enfin, après avoir recommencé chaque étape un bon paquet de fois j'ai enfin terminé lé coprs du bestiau :
J'ai bien galéré là.
La modélisation en NURBS m'a paru bien moins intuitive qu'en polygonale. Ce qui est assez troublant c'est qu'on ne déplace pas directement les surfaces mais des points (Control vertex) ou des"cages" (hull) qui en quelque sorte tirent sur la surface à distance....
Et puis pour connecter par exemple ici le corps avec les bras et les jambes la méthode est très particulière....ils apellent ça le Socking : si on veut attacher un cylindre au corps, on coupe ce cylindre en mettons 4 parties dans le sens de la hauteur, puis on attache chacune de ces parties au corps afin que le nurbs se déforme harmonieusement, puis on recoupe là ou on a attaché, et enfin on rassemble les control vertex par la commande global stitch.....pfff, pas évident tout ça!
Bon enfin, après avoir recommencé chaque étape un bon paquet de fois j'ai enfin terminé lé coprs du bestiau :



/idata%2F2012428%2FRendu-octane2.jpg)
/idata%2F2012428%2F%2FLogo-Mission-photo-8254-me-essai.jpg)
/idata%2F2012428%2F%2FRigging-Leon-2.jpg)
/idata%2F2012428%2F%2FRigging-Leon-1.jpg)
Commenter cet article